感知机
感知机算法
感知机(perceptron) 由Frank Rosenblatt于1957年提出,是一种广泛使用的线性分类器。感知器可谓是最简单的人工神经网络,只有一个神经元,是对生物神经元的简单数学模拟,有与生物神经元相对应的部件,如权重(突触)、偏置(阈值)及激活函数(细胞体),输出为+1或-1。
$$ y^{(n)} \boldsymbol{w}^{* \mathrm{T}} \boldsymbol{x}^{(n)}>0, \quad \forall n \in[1, N] $$$$ \boldsymbol{w} \leftarrow \boldsymbol{w}+y \boldsymbol{x} $$$$ \mathcal{L}(\boldsymbol{w} ; \boldsymbol{x}, y)=\max \left(0,-y \boldsymbol{w}^{\mathrm{T}} \boldsymbol{x}\right) $$$$ \frac{\partial \mathcal{L}(\boldsymbol{w} ; \boldsymbol{x}, y)}{\partial \boldsymbol{w}}=\left\{\begin{array}{ll} 0 & \text { if } \quad y \boldsymbol{w}^{\mathrm{T}} \boldsymbol{x}>0 \\ -y \boldsymbol{x} & \text { if } \quad y \boldsymbol{w}^{\mathrm{T}} \boldsymbol{x}<0 \end{array}\right. $$具体的感知机参数学习算法如下所示:
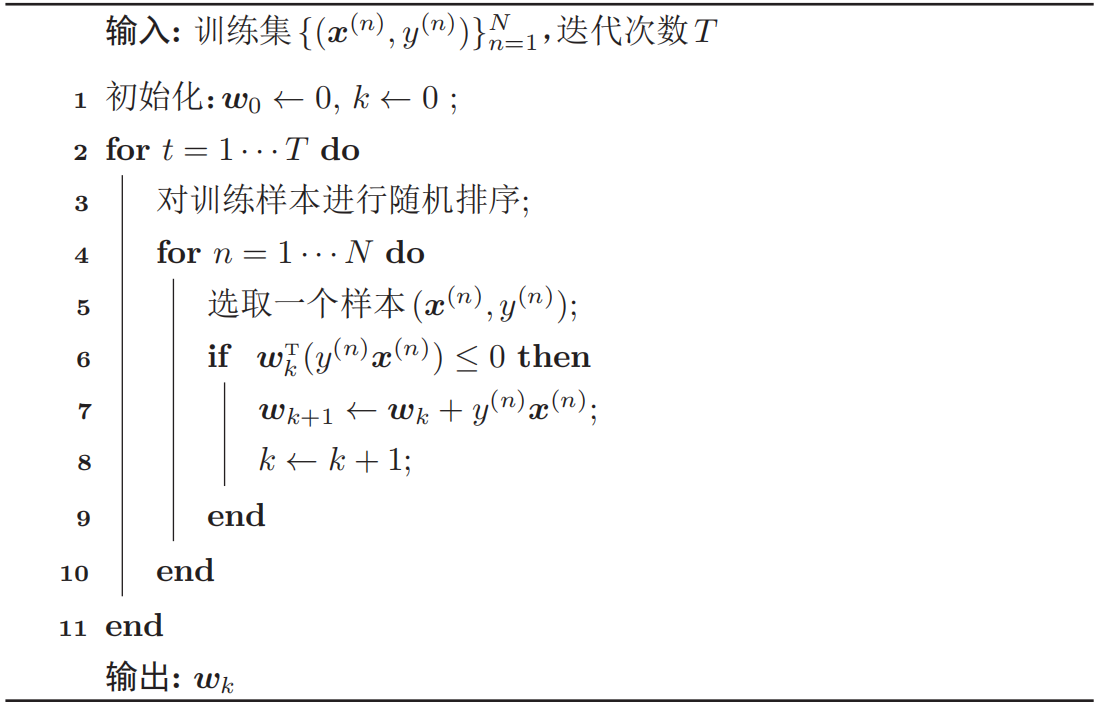
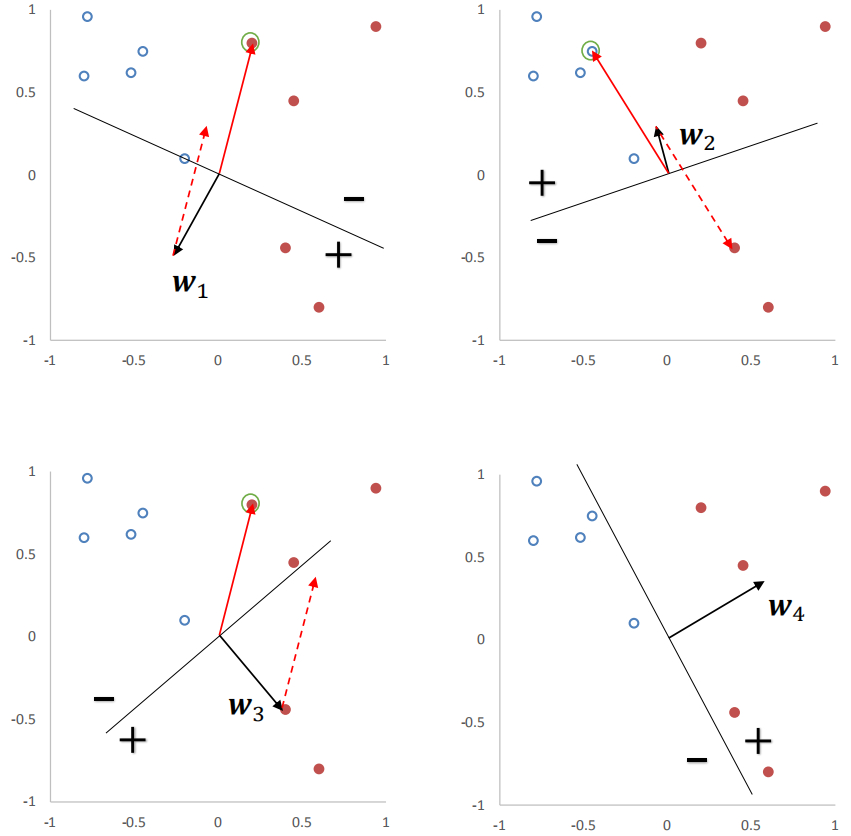
下图给出了感知机参数学习的更新过程,其中红色实心点为正例,蓝色空心点为负例。黑色箭头表示权重向量,红色虚线箭头表示权重的更新方向。
感知机算法的收敛性
Novikoff证明对于两类问题,如果训练集是线性可分的,那么感知器算法可以在有限次迭代后收敛。然而,如果训练集不是线性可分的,那么这个算法则不能确保会收敛。
$$\mathcal{D}=\left\{\left(\boldsymbol{ x }^{(n)}, y^{(n)}\right)\right\} _{n=1}^{N} $$$$(\boldsymbol{w}^{*})^{\mathrm{T}}(y^{(n)} \boldsymbol{x}^{(n)}) \geq \gamma$$。可以证明,假设$R$是训练集$\mathcal D$中最大的特征向量的模,即$R=\underset n\max |x^{(n)}|$,如果训练集$\mathcal D$线性可分,二分类感知机参数学习算法的权重更新次数不超过$\frac{R^2}{\gamma^2}$。
证明:
$$\boldsymbol{w}_{k}=\boldsymbol{w}_{k-1}+y^{(k)} \boldsymbol{x}^{(k)}$$$$ \boldsymbol{w}_{K}=\sum_{k=1}^{K} y^{(k)} \boldsymbol{x}^{(k)} $$分别计算$|\boldsymbol{w}_{K}|^2$的上下界:
$$ \begin{aligned} \left\|\boldsymbol{w}_{K}\right\|^{2} &=\left\|\boldsymbol{w}^{*}\right\|^{2} \cdot\left\|\boldsymbol{w}_{K}\right\|^{2} \\ & \geq\left\|\boldsymbol{w}^{* \mathrm{T}} \boldsymbol{w}_{K}\right\|^{2} \\ &=\left\|\boldsymbol{w}^{* \mathrm{T}} \sum_{k=1}^{K}\left(y^{(k)} \boldsymbol{x}^{(k)}\right)\right\|^{2} \\ &=\left\|\sum_{k=1}^{K} \boldsymbol{w}^{* \mathrm{T}}\left(y^{(k)} \boldsymbol{x}^{(k)}\right)\right\|^{2} \\ & \geq K^{2} \gamma^{2} \end{aligned} $$联立上下界,可得$K^{2} \gamma^{2} \leq\left|\boldsymbol{w}_{K}\right|^{2} \leq K R^{2}$。进一步可得到$K^{2} \gamma^{2} \leq K R^{2}$,即$K\leq \frac{R^2}{\gamma^2}$。因此,在线性可分的条件下,感知机的参数学习算法会在有限步内收敛。
虽然感知器在线性可分的数据上可以保证收敛,但其存在以下不足:
(1) 在数据集线性可分时,感知器虽然可以找到一个超平面把两类数据分开,但并不能保证其泛化能力。
(2) 感知器对样本顺序比较敏感。每次迭代的顺序不一致时,找到的分割超平面也往往不一致。
(3) 如果训练集不是线性可分的,就永远不会收敛。
参数平均感知机
感知器学习到的权重向量和训练样本的顺序相关。在迭代次序上排在后面的错误样本比前面的错误样本,对最终的权重向量影响更大。比如有1000 个训练样本,在迭代100个样本后,感知器已经学习到一个很好的权重向量。在接下来的899个样本上都预测正确,也没有更新权重向量。但是,在最后第1000个样本时预测错误,并更新了权重。这次更新可能反而使得权重向量变差。
$$ \hat{y}=\operatorname{sgn}\left(\sum_{k=1}^{K} c_{k} \operatorname{sgn}\left(\boldsymbol{w}_{k}^{\mathrm{T}} \boldsymbol{x}\right)\right) $$$$ \begin{aligned} \hat{y} &=\operatorname{sgn}\left(\sum_{k=1}^{K} c_{k}(\boldsymbol{w}_{k}^{\mathrm{T}} \boldsymbol{x})\right) \\ &=\operatorname{sgn}\left((\sum_{k=1}^{K} c_{k} \boldsymbol{w}_{k})^{\mathrm{T}} \boldsymbol{x}\right) \\ &=\operatorname{sgn}\left(\bar{\boldsymbol{w}}^{\mathrm{T}} \boldsymbol{x}\right) \end{aligned} $$其中$\bar{\boldsymbol w}$为平均的权重向量。
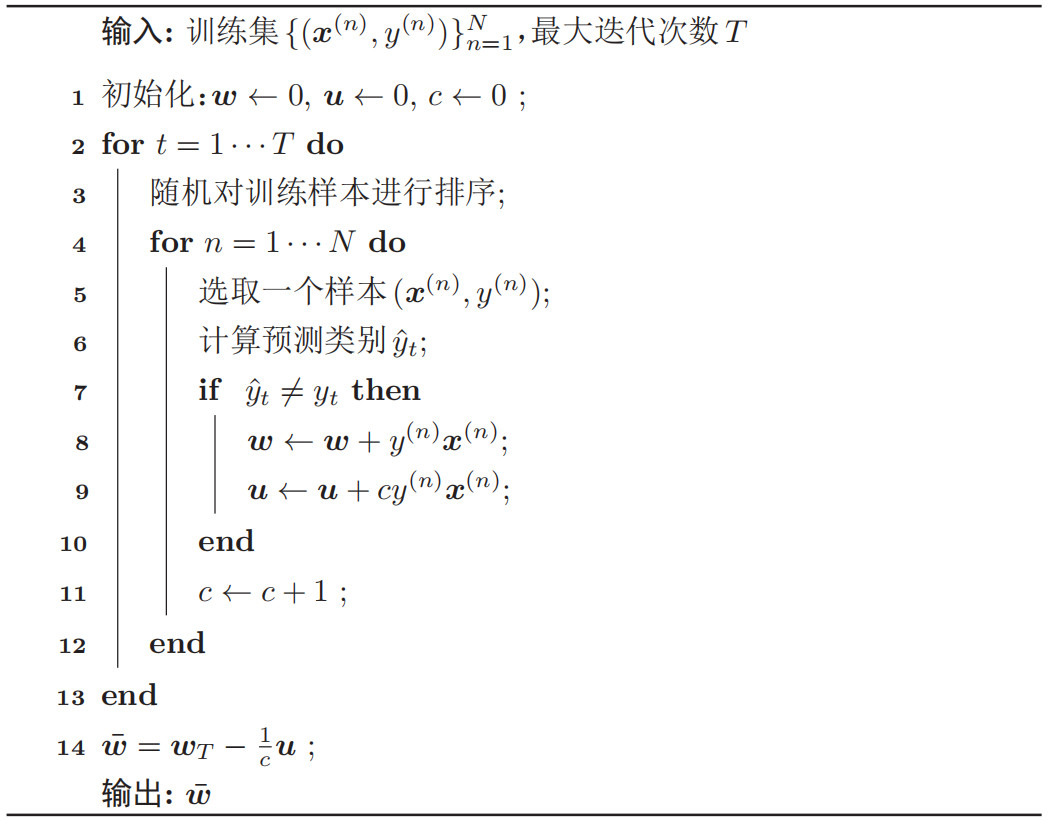
$$ \overline{\boldsymbol{w}}=\frac{\sum_{t=1}^{\mathrm{T}} \sum_{n=1}^{n} \boldsymbol{w}_{t, n}}{n T} $$$$ \overline{\boldsymbol{w}} \leftarrow \overline{\boldsymbol{w}}+\boldsymbol{w}_{t, n} $$但这个方法需要在处理每一个样本时都要更新$\bar{\boldsymbol w}$。因为$\bar{\boldsymbol w}$和$\boldsymbol w_{t,n}$都是稠密向量,所以更新操作比较费时。为了提高迭代速度,有很多改进的方法,让这个更新只需要在错误预测发生时才进行更新。一个改进的平均感知机算法的训练过程如下所示:
基于numpy的感知机实现
import numpy as np
class Perceptron:
def __init__(self):
pass
def sign(self, x, w, b):
return np.dot(x, w) + b
def initilize_with_zeros(self, dim):
w = np.zeros(dim)
b = 0.0
return w, b
def train(self, X_train, y_train, learning_rate):
# 参数初始化
w, b = self.initilize_with_zeros(X_train.shape[1])
# 初始化误分类
is_wrong = False
while not is_wrong:
wrong_count = 0
for i in range(len(X_train)):
X = X_train[i]
y = y_train[i]
# 如果存在误分类点,更新参数,直到没有误分类点
if y * self.sign(X, w, b) <= 0:
w = w + learning_rate * np.dot(y, X)
b = b + learning_rate * y
wrong_count += 1
if wrong_count == 0:
is_wrong = True
print('There is no missclassification!')
# 保存更新后的参数
params = {
'w': w,
'b': b
}
return params
使用scikit-learn中的感知机算法对自行构建的数据集进行二分类
import numpy as np
from sklearn.datasets import make_classification
from sklearn.linear_model import Perceptron
from matplotlib import pyplot as plt
# 使用sklearn内置函数生成二分类的样本
X, y=make_classification(n_samples=1000, n_features=2, n_redundant=0, n_informative=1, n_clusters_per_class=1)
# 训练数据和测试数据
X_data_train = X[:800, :]
X_data_test = X[800:, :]
y_data_train = y[:800]
y_data_test = y[800:]
positive_X1 = [X[i, 0] for i in range(1000) if y[i] == 1]
positive_X2 = [X[i, 1] for i in range(1000) if y[i] == 1]
negetive_X1 = [X[i, 0] for i in range(1000) if y[i] == 0]
negetive_X2 = [X[i, 1] for i in range(1000) if y[i] == 0]
# 构建感知机
clf = Perceptron(fit_intercept=False, n_iter=30, shuffle=False)
# 使用训练数据进行训练
clf.fit(X_data_train, y_data_train)
# 得到训练结果,权重矩阵
print(clf.coef_)
# 输出为:[[0.21720699 2.49185955]]
# 预测
acc = clf.score(X_data_test, y_data_test)
print(acc)
plt.scatter(positive_X1, positive_X2, c='red')
plt.scatter(negetive_X1, negetive_X2, c='blue')
# 绘制出分类超平面
line_X = np.arange(-4,4)
line_y = line_X * (-clf.coef_[0][0] / clf.coef_[0][1]) - clf.intercept_
plt.plot(line_X, line_y)
plt.show()
参考资料
- 李航. 统计学习方法. 北京: 清华大学出版社, 2019.
- 邱锡鹏. 神经网络与深度学习. 北京: 机械工业出版社, 2020.
- 鲁伟. 机器学习: 公式推导与代码实现. 北京: 人民邮电出版社, 2022.
- 利用scikit-learn实现感知机:https://blog.csdn.net/weixin_38300566/article/details/80757105