线性代数
向量和向量空间
向量
标量(scalar)是一个实数,一般用斜体小写字母$a,b,c$来表示。向量(vector)是由一组实数组成的有序数组,一个n维向量$\boldsymbol a$由n个有序实数组成,表示为$\boldsymbol{a}=\left[a_{1}, a_{2}, \cdots, a_{n}\right]$,其中$a_{i}$称为向量$\boldsymbol{a}$的第$i$个分量(第$i$维)。
# numpy库常用于实现线性代数中向量和矩阵的基本操作
import numpy as np
# numpy中向量的定义
v_1 = np.array([1, 2, 3, 4, 5])
v_2 = np.array([5.6, 4.6, 3.6, 2.6, 1.6])
向量空间
向量空间(vector space)也称线性空间(linear space),是指由向量组成的集合,并满足以下两个条件:
(1) 向量加法封闭性:向量空间$\mathcal V$中的任意两个向量$\boldsymbol a$和$\boldsymbol b$,它们的和$\boldsymbol a+\boldsymbol b$也属于向量空间$\mathcal V$;
# numpy实现向量加法
v_a = np.add(v_1, v_2)
print(v_a, v_a.shape) # 结果为向量
(2) 标量乘法封闭性:向量空间$\mathcal V$中的任一向量$\boldsymbol a$和任一标量$c$,它们的乘积$c\boldsymbol a$也属于向量空间$\mathcal V$。
# numpy实现向量与标量相乘
k = 2.0
v_k2 = k * v_1
print(v_k2, v_k2.shape) # 结果为向量
线性子空间:向量空间$\mathcal V$的线性子空间$\mathcal U$是$\mathcal V$的一个子集,并且满足向量空间的条件。
设$v_1,v_2,\cdots,v_n$为向量空间$\mathcal V$中的向量,则其线性组合$a_1v_1+a_2v_2+\cdots+a_nv_n$构成$\mathcal V$的子空间,并将其称为向量$v_1,v_2,\cdots,v_n$**张成(span)**的子空间,或$v_1,v_2,\cdots,v_n$的张成,记作$\operatorname{span}(v_1,v_2,\cdots,v_n)$。
$$\left\{\boldsymbol{v}_{1}, \boldsymbol{v}_{2}, \cdots, \boldsymbol{v}_{n}\right\}$$$$\left\{\boldsymbol{v}_{1}, \boldsymbol{v}_{2}, \cdots, \boldsymbol{v}_{n}\right\}$$是线性无关的,也称为线性独立的。
$$ \boldsymbol{v}=\lambda_{1} \boldsymbol{e}_{1}+\lambda_{2} \boldsymbol{e}_{2}+\cdots+\lambda_{n} \boldsymbol{e}_{n} $$$\mathcal B$中的向量称为基向量(base vector)。$(\lambda_1,\lambda_2,\cdots,\lambda_n)$称为向量$\boldsymbol v$关于基$\mathcal B$的坐标(coordinate)。向量空间中基的个数即向量空间的维数。
$$ \langle\boldsymbol{a}, \boldsymbol{b}\rangle=\boldsymbol a^\text T \boldsymbol b=\sum_{i=1}^{n} a_{i} b_{i} $$# numpy实现向量内积
v_i = np.inner(v_1, v_2)
print(v_i, v_i.shape) # 结果为标量
# numpy实现向量外积
v_o = np.outer(v_1, v_2)
print(v_o, v_o.shape) # 结果为矩阵
正交(orthogonal):如果两个向量的内积为0,则它们正交。如果一个向量$\boldsymbol v$与子空间$\mathcal U$中的每个向量都正交,那么向量$\boldsymbol v$与子空间$\mathcal U$正交。
范数
$$ \ell_{p}(\boldsymbol{v}) \equiv\|\boldsymbol{v}\|_{p}=\left(\sum_{i=1}^{n}\left|v_{i}\right|^{p}\right)^{1 / p} $$# numpy实现L2范数
v_1_2 = v_1 * v_1 # '*'运算符代表向量对应位置相乘(即内积)
sum_l2 = np.sum(v_1_2)
l2 = np.sqrt(sum_l2)
print(l2)
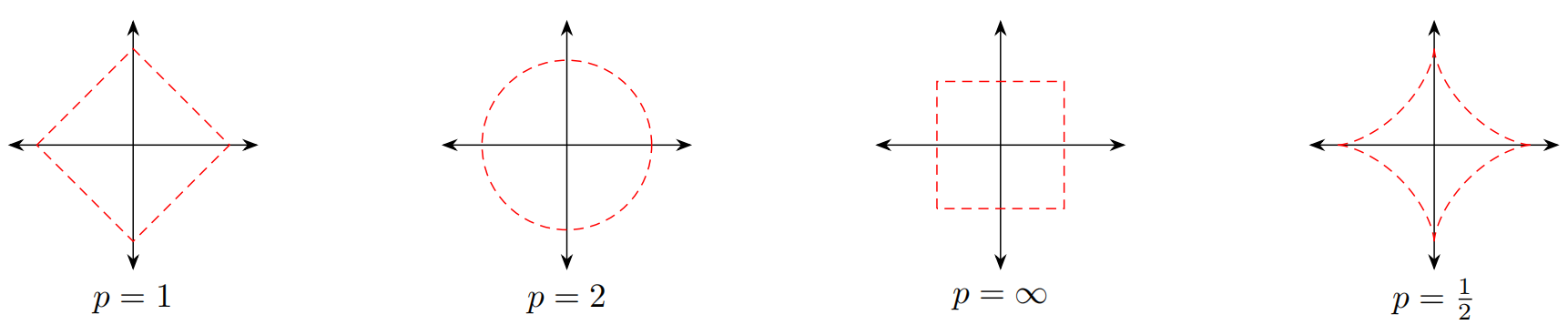
其中$p \geqslant 0$为一个标量的参数。当$p=1$时,$\ell_1$范数为向量的各元素绝对值之和,称为曼哈顿距离;$p=2$时,$\ell_2$范数为向量的各元素的平方和再开平方,称为欧氏距离。$\ell_{\infty}$范数为向量的各个元素的最大绝对值。下图给出了常见范数的示例,其中红线表示不同范数$\ell_p=1$的点:
矩阵
线性映射
$$ \boldsymbol{x}=\left[\begin{array}{c} x_{1} \\ x_{2} \\ \vdots \\ x_{n} \end{array}\right], \quad \boldsymbol{y}=\left[\begin{array}{c} y_{1} \\ y_{2} \\ \vdots \\ y_{m} \end{array}\right] $$在没有特殊说明的情况下,向量默认为列向量,且行向量表示为$[x_1,x_2,\cdots,x_n]$,列向量表示为$[x_1;x_2;\cdots;x_n]$或行向量的转置$[x_1,x_2,\dots,x_n]^\text T$。
# numpy中矩阵的定义
A = [[1, 2, 3, 4],
[5, 6, 7, 8],
[9, 10, 11, 12]] # (3,4)
A = np.array(A)
print(A.shape)
B = [[1, 2, 3, 4, 5],
[6, 7, 8, 9, 10],
[11, 12, 13, 14, 15],
[16, 17, 18, 19, 20]] # (4,5)
B = np.array(B)
print(B.shape)
# 满秩矩阵
X = [[2, 6, 9],
[1, 9, 3],
[7, 2, 4]]
矩阵操作
$$[A+B]_{ij}=a_{ij}+b_{ij}$$,必须保证运算的两个矩阵的大小相同。
# numpy实现矩阵加法
print(np.add(A, A))
,必须保证第一个矩阵的列数和第二个矩阵的行数相等。矩阵的乘积表示一个复合线性映射,即先完成线性映射$B$,再完成线性映射$A$。如果$A$是$k \times m$阶矩阵,$B$是$m \times n$阶矩阵,则其乘积$AB$是一个$k \times n$阶矩阵。矩阵乘法满足结合律和分配率:
结合律:$(AB)C=A(BC)$,
分配率:$(A+B)C=AC+BC,C(A+B)=CA+CB$。
# numpy实现矩阵乘法
C = np.dot(A, B)
print(C, C.shape) # (3,4) * (4,5) = (3,5)
,即$A$和$B$中对应的元素相乘,必须保证运算的两个矩阵的大小相同。
# numpy实现Hadamard积
print(np.multiply(A, A))
显然,$(A+B)^\text T =A^\text T + B^\text T$,$(AB)^\text T=B^\text T A^\text T$。
# numpy实现矩阵转置
A_T = np.transpose(A)
print(A_T, A_T.shape)
# numpy计算方阵的迹
print(np.trace(A)) # 结果为标量
(6) 行列式(determinant):$n$阶方阵$A$的行列式定义为$\det(A)=\sum_{\sigma \in S_n}\text{par}(\sigma)A_{1\sigma_1 A_2\sigma_2 \cdots A_n\sigma_n}$,其中$S_n$为所有$n$阶排列(permutation)的集合,$\text{par}(\sigma)$的值为-1或+1取决于$\sigma$为及排列或偶排列,即其中出现降序的次数为奇数或偶数,例如$(1,3,2)$中降序次数为1,$(3,1,2)$中降序次数为2。单位阵的行列式为$\det(I)=1$。
# numpy计算方阵的行列式
print(np.linalg.det(X))
print(np.linalg.det(A)) # 报错,计算行列式的矩阵必须为方阵
$n$阶方阵$A$的行列式有如下性质:
如果行列式中有一行为零,或有两行相同,或有两行成比例,那么行列式为零;
对换行列式中两行的位置,行列式反号;
把一行的倍数加到另一行,行列式不变;
$$ \begin{aligned} \det(cA)&=c^n\det(A)\\ \det(A^\text T)&=\det(A)\\ \det(AB)&=\det(A)\det(B)\\ \det(A^{-1})&=\det(A)^{-1}\\ \det(A^{n})&=\det(A)^{n} \end{aligned} $$$$ \begin{aligned} \left|\left[a_{11}\right]\right|&=a_{11}\\ \left|\left[\begin{array}{ll} a_{11} & a_{12} \\ a_{21} & a_{22} \end{array}\right]\right|&=a_{11} a_{22}-a_{12} a_{21}\\ \left|\left[\begin{array}{lll} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{array}\right]\right|&=\begin{array}{c} a_{11} a_{22} a_{33}+a_{12} a_{23} a_{31}+a_{13} a_{21} a_{32} \\ -a_{11} a_{23} a_{32}-a_{12} a_{21} a_{33}-a_{13} a_{22} a_{31} \end{array} \end{aligned} $$(7) 秩(rank):一个矩阵$A$的列秩是$A$的线性无关的列向量的数量,行秩是$A$的线性无关的行向量数量。一个矩阵的列秩和行秩总是相等的,简称为秩。一个$m \times n$阶矩阵$A$的秩最大为$\min(m,n)$。若$\text{rank}(A)=\min(m,n)$,则称矩阵$A$是满秩的。如果一个矩阵不满秩,说明其包含线性相关的列向量或行向量,其行列式为0。
# numpy计算矩阵的秩
print(np.linalg.matrix_rank(X))
print(np.linalg.matrix_rank(A))
两个矩阵的乘积$AB$的秩$\text{rank}(AB) \leqslant \min(\text{rank}(A),\text{rank}(B))$。
矩阵$A$的秩=矩阵$A$的列秩=矩阵$A$的行秩,矩阵的初等变换皆不改变矩阵的秩、行秩和列秩。
$$ \|A\|_{p}=\left(\sum_{i=1}^{m} \sum_{j=1}^{n}\left|a_{i j}\right|^{p}\right)^{1 / p} $$$$ \begin{aligned} (A^{-1})^{-1}&=A \\ (A B)^{-1}&=B^{-1} A^{-1} \\ (A^{-1})^{T}&=(A^{T})^{-1} \end{aligned} $$一个方阵的行列式等于0当且仅当该方阵不可逆。不可逆矩阵也称奇异矩阵,可逆矩阵也称非奇异矩阵。对非方阵或奇异矩阵,可以计算其伪逆。
求$A^{-1}$的算法:构造增广矩阵$[A,I]$,进行行化简,若$A$行等价于$I$,则$[A,I]$行等价于$[I,A^{-1}]$,否则$A$没有逆。
# numpy计算方阵的逆
print(np.linalg.inv(X)) # print(X.I)也可以
print(np.linalg.inv(A)) # 报错,计算逆的矩阵必须为方阵
# numpy计算矩阵的伪逆
M = np.zeros((4, 4)) # 定义一个奇异阵M
M[0, -1] = 1
M[-1, 0] = -1
M = np.matrix(M)
print(M)
# print(M.I) # 将报错,矩阵M为奇异矩阵,不可逆
print(np.linalg.pinv(M)) # 求矩阵M的伪逆(广义逆矩阵)
(10) 初等行变换:对于矩阵$A$,把$A$的某一行所有元素乘以一非零元素,或把$A$的两行互换,或把$A$的某一行换乘它本身与另一行的倍数的和,这三种操作称为矩阵$A$的初等行变换。若矩阵$A$经过有限次初等行变换后可以转化为矩阵$B$,则称矩阵$A$和矩阵$B$是行等价的。
定理:$n \times n$矩阵$A$是可逆的,当且仅当$A$行等价于单位矩阵$I_n$。这时,将$A$化简为$I_n$的一系列初等行变换也可以将$I_n$转换为$A^{-1}$。
证明:$A \sim E_1A \sim E_2(E_1A) \sim \cdots \sim E_p(E_{p-1} \cdots E_1A)=I_n$,因此$E_p E_{p-1} \cdots E_1 I_n=A^{-1}$。
(11) Numpy中矩阵运算的广播机制:
# 通常情况下,numpy两个数组的相加、相减以及相乘都是对应元素之间的操作
x = np.array([[2, 2, 3], [1, 2, 3]])
y = np.array([[1, 1, 3], [2, 2, 4]])
print(x * y)
# 当两个张量维度不同,numpy可以自动使用广播机制使得运算得以完成。例如:
arr = np.random.randn(4, 3) # (4,3)
arr_mean = arr.mean(axis=0) # shape(3,)
demeaned = arr - arr_mean # (4,3) - (3,)
print(demeaned)
# 广播的原则:如果两个数组的后缘维度(trailing dimension,即从末尾开始算起的维度)的轴长度相符,或其中的一方的长度为1,
# 则认为它们是广播兼容的。广播会在缺失和(或)长度为1的维度上进行。
# 广播主要发生在两种情况,一种是两个数组的维数不相等,但是它们的后缘维度的轴长相符,另外一种是有一方的长度为1。
# 1. 数组维度不同,后缘维度的轴长相符
arr1 = np.array([[0, 0, 0], [1, 1, 1], [2, 2, 2], [3, 3, 3]]) # (4,3)
arr2 = np.array([1, 2, 3]) # (3,)
arr_sum = arr1 + arr2
print(arr_sum)
# 在上例中,(4,3) + (3,) = (4,3)。类似的例子还有:(3,4,2) + (4,2) = (3,4,2)
# 2. 有一方的长度为1
arr1 = np.array([[0, 0, 0], [1, 1, 1], [2, 2, 2], [3, 3, 3]]) # (4,3)
arr2 = np.array([[1], [2], [3], [4]]) # (4,1)
arr_sum = arr1 + arr2
print(arr_sum)
# 在上例中,(4,3) + (4,1) = (4,3)类似的例子还有:(4,6) + (1,6) = (4,6);(3,5,6) + (1,5,6) = (3,5,6);
# (3,5,6) + (3,1,6) = (3,5,6);(3,5,6) + (3,5,1) = (3,5,6)等
矩阵类型
$$ A=\frac{1}{2}(A+A^{T})+\frac{1}{2}(A-A^{T}) $$对称矩阵在实际应用中有很多良好的性质,通常将$n$维对称矩阵的集合记为$\mathbb S^n$。
(2) 对角矩阵(diagonal matrix):除了主对角线外的元素皆为0的矩阵,对角线上的元素可以为0或其他值。一个$n \times n$的对角矩阵$A$满足:$[A]_{ij}=0 \ \ \text{ if } i \not = j, \forall i,j \in {1,\cdots,n}$。
对角矩阵也可以记作$\text{diag}(\boldsymbol a)$,其中$\boldsymbol a$为一个$n$维向量,并满足$[A]_{ii}=a_i$。一个$n \times n$阶对角矩阵$A=\text{diag}(A)$和$n$维向量$\boldsymbol b$的乘积为一个$n$维向量:$A \boldsymbol{b}=\operatorname{diag}(\boldsymbol{a}) \boldsymbol{b}=\boldsymbol{a} \odot \boldsymbol{b}$,其中$\odot$表示点乘。
(3) 单位矩阵(identity matrix):一种特殊的对角矩阵,其主对角线元素为1,其余元素为0。$n$阶单位矩阵$I_n$是一个$n \times n$的方块矩阵,可以记为$I_n=\text{diag}(1,1,\cdots,1)$。
一个$m \times n$的矩阵$A$和单位矩阵的乘积(左乘积和右乘积)等于其本身:$AI_n=I_mA=A$。
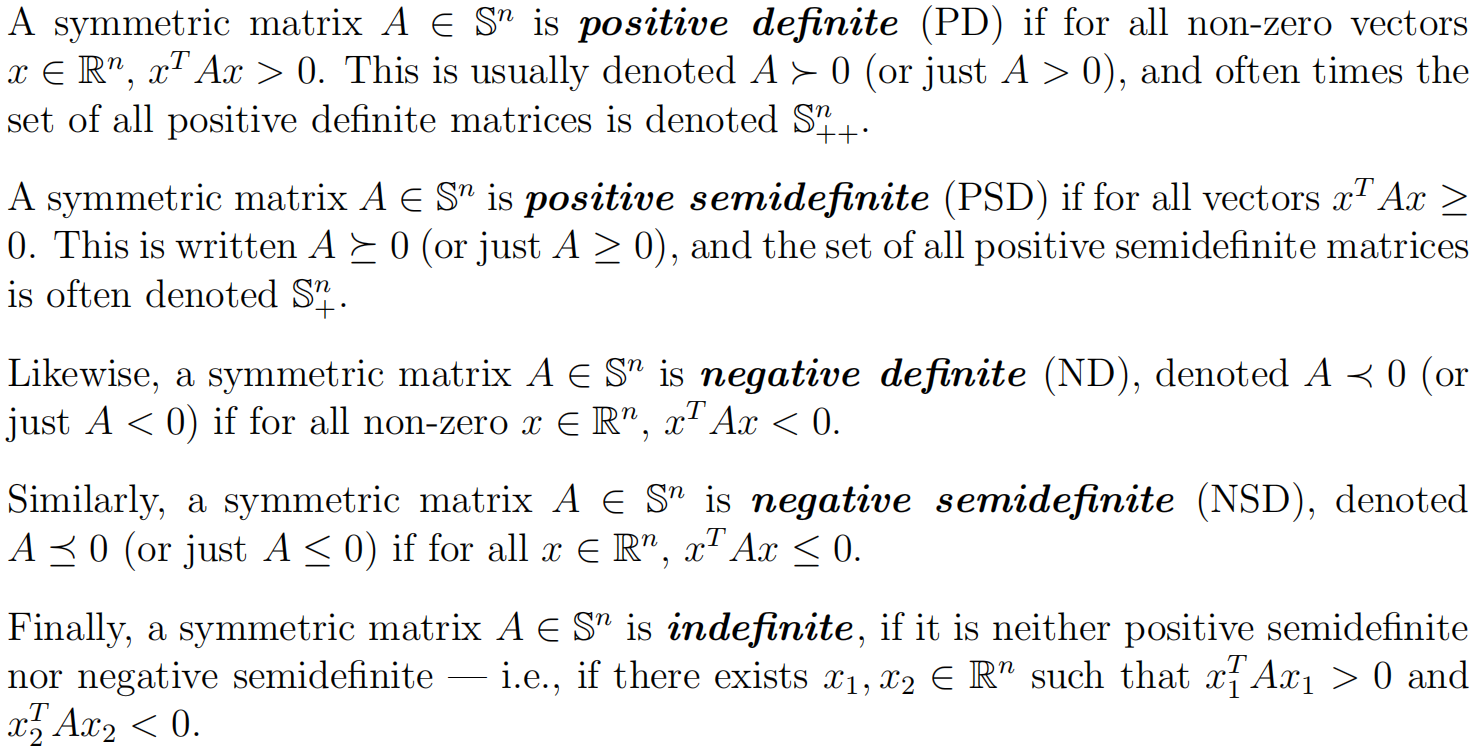
(4) 正定矩阵(positive-definite matrix):对于一个$n \times n$阶的对称矩阵$A$,如果对于所有的非零向量$\boldsymbol x \in \mathbb R^n$,都满足$\boldsymbol x^\text T A \boldsymbol x>0$,则$A$为正定矩阵。如果$\boldsymbol x^\text T A \boldsymbol x\ \geqslant 0$,则$A$为半正定矩阵(positive-semidefinite matrix)。
(5) 正交矩阵(orthogonal matrix):对于方阵$U \in \mathbb R^{n \times n}$,如果$UU^T = I$或$U^TU = I$,则称$U$为正交矩阵。
(6) Gram矩阵:向量空间中一组向量$\boldsymbol v_1,\boldsymbol v_2,\cdots,\boldsymbol v_n$的Gram矩阵$G$是内积的对称矩阵,其元素$G_{ij}=\boldsymbol v_i^\text T \boldsymbol v_j$。
相似矩阵与对角化
设$A$和$B$是$n \times n$矩阵,如果存在可逆矩阵$P$,使得$P^{-1}AP=B$,则称$A$相似于$B$,$B$也相似于$A$。将$A$变成$P^{-1}AP$的变换称为相似变换。
若$A$和$B$是相似的,那么它们有相同的特征多项式,有相同的特征值;但是有相同的特征值的矩阵并不一定相似。
证明:$P^{-1}AP=B$,则$|B-\lambda I|=|P^{-1}AP-\lambda I|=|P^{-1}(A-\lambda I)P|=|A-\lambda I|$。
若方阵$A$相似于对角矩阵,则称$A$可对角化。$n \times n$矩阵$A$可对角化的充分必要条件是$A$有$n$个线性无关的特征向量。
二次型与正定矩阵
$$ x^{\text T} A x=\sum_{i=1}^{n} x_{i}(A x)_{i}=\sum_{i=1}^{n} x_{i}\left(\sum_{j=1}^{n} A_{i j} x_{j}\right)=\sum_{i=1}^{n} \sum_{j=1}^{n} A_{i j} x_{i} x_{j} $$$$ x^{\text T} A x=(x^{\text T} A x)^{\text T}=x^{\text T} A^{\text T} x=x^{\text T}(\frac{1}{2} A+\frac{1}{2} A^{\text T}) x $$其中,第一个等式依据标量的转置等于其自身的事实,而第二个等式源自以下事实:我们对两个本身相等的量求平均。 据此可以得出结论,只有$A$的对称部分对二次形有帮助。 由于这个原因,我们经常隐式地假设以二次形式出现的矩阵是对称的。
正定矩阵、半正定矩阵、负定矩阵、半负定矩阵以及不定矩阵的定义如下:
一个关于正定矩阵或负定矩阵的重要性质是,其总是满秩的,因此一定是可逆矩阵。证明如下:
$$ A x=\sum_{i=1}^{n} x_{i} a_{i}=0 $$对于某些非零向量$x$,上式会使得$x^{T} A x=0$,与正定或负定矩阵的定义矛盾。证毕。
特征值与特征向量
对矩阵$A$,如果存在一个标量$\lambda$和一个非零向量$x$满足$Ax = \lambda x$,则$\lambda$和$x$分别称为矩阵$A$的特征值(eigenvalue)和特征向量(eigenvector)。对于任意特征向量$x$和标量$c$,$A (cx) = \lambda (cx)$,因此$cx$也是特征向量。因此,在通常情况下,仅讨论模为1的特征向量。矩阵$A$可以认为是一个变换,这个变换的特殊之处是,当它作用在特征向量$x$上的时候,$x$只产生了缩放变换,并没有产生旋转变换。
$$ (\lambda I-A)x=\boldsymbol 0,x \not = \boldsymbol 0 $$这是含有$n$个未知数的$n$个方程的齐次线性方程组,它有非零解的充分必要条件是系数行列式$|(\lambda I-A)|=0$。将该等式变形,会得到关于$\lambda$的多项式。将多项式进行求解后,会得到最多$n$个特征值$\lambda$。将特征值分别代入原式,便可以得到最多$n$个特征向量。这种方式仅仅作为手工求解特征值和特征向量的方法,并不被实际应用。
以下是关于特征值的一些性质。其中$A \in \mathbb R^{n \times n}$,$\lambda_1\cdots,\lambda_n$是$n$个特征值,对应$n$个特征向量。$x_1,\cdots,x_n$。
若矩阵$A$的特征向量线性无关,则矩阵$X$是可逆矩阵,则$A=X \Lambda X^{-1}$。该过程称为对角化(diagonalization)。
# numpy实现矩阵特征值分解
X = [[1, 2, 3],
[4, 5, 6],
[7, 8, 9]]
eigenvalues, eigenvectors = np.linalg.eig(X)
print("eigenvalue: \n", eigenvalues)
print("eigenvector: \n", eigenvectors)
奇异值分解
奇异值分解的定义与性质
任意一个$m \times n$阶矩阵,都可以表示为三个矩阵的乘积,分别是$m$阶正交矩阵、由降序排列的非负的对角线元素组成的$m \times n$阶对角矩阵和$n$阶正交矩阵,称为该矩阵的奇异值分解(singular value decomposition, SVD)。一个矩阵的奇异值分解一定存在,但不唯一。
奇异值分解可以看作是矩阵数据压缩的一种方法,即用因子分解的方式近似地表示原始矩阵,这种近似是在平方损失意义下的最优近似。
定义与定理
矩阵的奇异值分解是指将一个非零的$m \times n$阶实矩阵$A \in \mathbb R^{m \times n}$表示为三个实矩阵乘积形式的运算$A=U \Sigma V^\text T$。其中,$U$是$m$阶正交矩阵,$V$是$n$阶正交矩阵,$\Sigma$是降序排列的非负对角线元素组成的$m \times n$阶对角矩阵,满足$UU^\text T=I$,$VV^\text T=I$,$\Sigma=\text{diag}(\sigma_1,\sigma_2,\cdots,\sigma_p)$($\sigma_i$非负且降序排列),$p=\min(m,n)$。$U \Sigma V^\text T$称为矩阵$A$的奇异值分解,$\sigma_i$称为矩阵$A$的奇异值,$U$的列向量称为左奇异向量,$V$的列向量称为右奇异向量。
注意:奇异值分解不要求$A$是方阵,事实上,奇异值分解可以看作方阵对角化的推广。
奇异值分解基本定理:若$A$为实矩阵,则$A$的奇异值分解一定存在。
紧奇异值分解与截断奇异值分解
$A=U \Sigma V^\text T$又称为矩阵的完全奇异值分解,实际常用的是紧凑形式和截断形式。
(1) 紧奇异值分解:设$m \times n$阶实矩阵$A$的秩$\text{rank}(A)=r,r \leqslant \min(m, n)$,则称$U_r \Sigma_r V_r^\text T$为矩阵$A$的紧奇异值分解。其中$U_r$是$m \times r$矩阵,$V_r$是$n \times r$矩阵,$\Sigma_r$是$r$阶对角矩阵。
(2) 截断奇异值分解:在矩阵的奇异值分解中,只取最大的$k$个奇异值($k<r$,$r$为矩阵的秩)对应的部分,就得到矩阵的截断奇异值分解。实际应用中提到矩阵的奇异值分解时,通常指截断奇异值分解。此时$\Sigma k$是$k$阶对角矩阵。
几何解释
三个矩阵(对应一个线性变换)可以理解为三个线性变换的步骤:一个坐标系的旋转变换、一个坐标轴的缩放变换和一个坐标系的旋转或反射变换。
奇异值分解的计算
奇异值分解的计算过程如下:
(1) 首先求$A^\text T A$的特征值,记作$\lambda_1,\cdots,\lambda_n$,共有$n$个,然后求解出对应的特征向量$x_1,\cdots,x_n$。
(2) 求$n$阶正交矩阵$V$:将特征向量单位化,得到单位特征向量$v_1,\cdots,v_n$构成$n$阶正交矩阵$V=[v_1 \ v_2 \ \cdots \ v_n]$。
(3) 求$m \times n$阶对角矩阵$\Sigma$:计算$A$的奇异值$\sigma_i=\sqrt{\lambda_i},i=1,2,\cdots,n$(奇异值就是$A^\text T A$的特征向量的平方根),构造$m \times n$阶对角矩阵$\Sigma$,主对角线元素是奇异值,其余元素为0。
(4) 求$m$阶正交矩阵$U$:对$A$的前$r$个正奇异值,令$u_j=(1/\sigma_j)Av_j,j=1,2,\cdots,r$,得到$U_1=[u_1 \ u2 \cdots \ u_r]$。求$A^\text T$的零空间(即$A^\text T x=0$的解空间)一组标准正交基${u_{r+1},u_{r+2},\cdots,u_m}$,令$U_2=[u_{r+1},u_{r+2},\cdots,u_m]$并令$U=[U_1 \ U_2]$,得到正交矩阵$U$。
从上述算法可以看出,奇异值分解的关键在于的$A^\text T A$特征值的计算。实际应用中的奇异值分解算法是通过求解$A^\text T A$的特征值,但不直接计算$A^\text T A$。按照这个思路,产生了许多矩阵奇异值分解的有效算法。
# numpy实现矩阵的奇异值分解
U, Sigma, V = np.linalg.svd(X, )
print("U: \n", U)
print("Sigma: \n", Sigma)
print("V: \n", V)
# 通过截断奇异值分解重建矩阵X
Sigma[1:] = 0
X_rebuild = np.mat(U) * np.mat(np.diag(Sigma)) * np.mat(V)
print(X_rebuild) # 矩阵X的近似
# 奇异值分解在图像处理中的应用
import matplotlib.pyplot as plt
lenna = plt.imread('lenna.jpg') # 需要预先将图片lenna.jpg放入当前目录中
print(lenna.shape) # (2318,1084,3)
lenna = lenna[:1000, :1000, 2] # 将图像大小调整为(1000,1000),且仅选取一个通道
print(lenna.shape) # (1000,1000)
U, Sigma, V = np.linalg.svd(lenna)
print(U.shape, Sigma.shape, V.shape)
# 通过截断奇异值分解重建莱娜图,观察k取不同值时的重建结果
k = [1000, 500, 300, 200, 100, 50]
for i in range(len(k)):
Sigma_k = np.copy(Sigma)
Sigma_k[k[i]:] = 0
lenna_rebuild = np.mat(U) * np.mat(np.diag(Sigma_k)) * np.mat(V)
plt.subplot(2, 3, i + 1)
plt.title('truncated k={}'.format(k[i]))
plt.imshow(lenna_rebuild)
plt.show()
LU分解
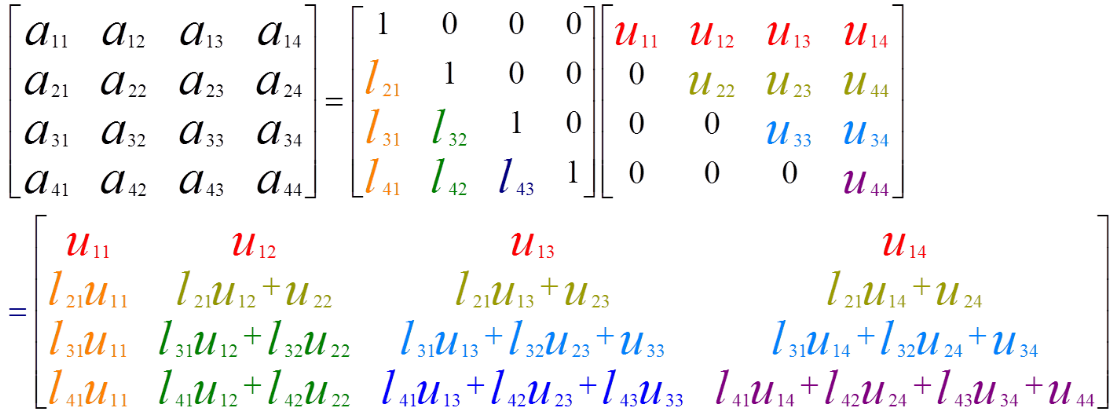
LU分解(LU decomposition)是矩阵分解的一种,可以将一个矩阵分解为一个单位下三角矩阵和一个上三角矩阵的乘积(有时是它们和一个置换矩阵的乘积)。LU分解主要应用在数值分析中,用来解线性方程、求反矩阵或计算行列式。本质上,LU分解是高斯消元的一种表达方式。首先,对矩阵$A$通过初等行变换将其变为一个上三角矩阵;然后,将原始矩阵$A$变为上三角矩阵的过程,对应的变换矩阵为一个下三角矩阵。这中间的过程,就是Doolittle algorithm(杜尔里特算法)。
在求解线性方程组$Ax=b$时,求解时间为$\frac{2}{3}n^3$。将矩阵$A$进行LU分解(复杂度$\frac{2}{3}n^3$)后,可以将线性方程组转换为$L y=b$和$U x=y$,二者的计算复杂度均为$n^2$,运算速度显著提升。
# numpy实现矩阵LU分解
import numpy as np
def lu_decomposition(A):
n = len(A[0])
L = np.zeros([n, n])
U = np.zeros([n, n])
for i in range(n):
L[i][i] = 1
if i == 0:
U[0][0] = A[0][0]
for j in range(1, n):
U[0][j] = A[0][j]
L[j][0] = A[j][0] / U[0][0]
else:
for j in range(i, n): # U
temp = 0
for k in range(0, i):
temp = temp + L[i][k] * U[k][j]
U[i][j] = A[i][j] - temp
for j in range(i + 1, n): # L
temp = 0
for k in range(0, i):
temp = temp + L[j][k] * U[k][i]
L[j][i] = (A[j][i] - temp) / U[i][i]
return L, U
A = np.array([[4., -1., -1., 0., 0., 0., 0., 0.],
[-1., 4., -1., -1., 0., 0., 0., 0.],
[-1., -1., 4., -1., -1., 0., 0., 0.],
[0., -1., -1., 4., -1., -1., 0., 0.],
[0., 0., -1., -1., 4., -1., -1., 0.],
[0., 0., 0., -1., -1., 4., -1., -1.],
[0., 0., 0., 0., -1., -1., 4., -1.],
[0., 0., 0., 0., 0., -1., -1., 4.]])
L, U = lu_decomposition(A)
print(L.tolist())
print(U.tolist())
参考资料
-
李航. 统计学习方法. 北京: 清华大学出版社, 2019.
-
周志华. 机器学习. 北京: 清华大学出版社, 2016.
-
邱锡鹏. 神经网络与深度学习. 北京: 机械工业出版社, 2020.
-
Stanford University机器学习课程:http://cs229.stanford.edu/
-
Numpy官方文档:https://numpy.org/doc/stable/index.html#