降维
主成分分析
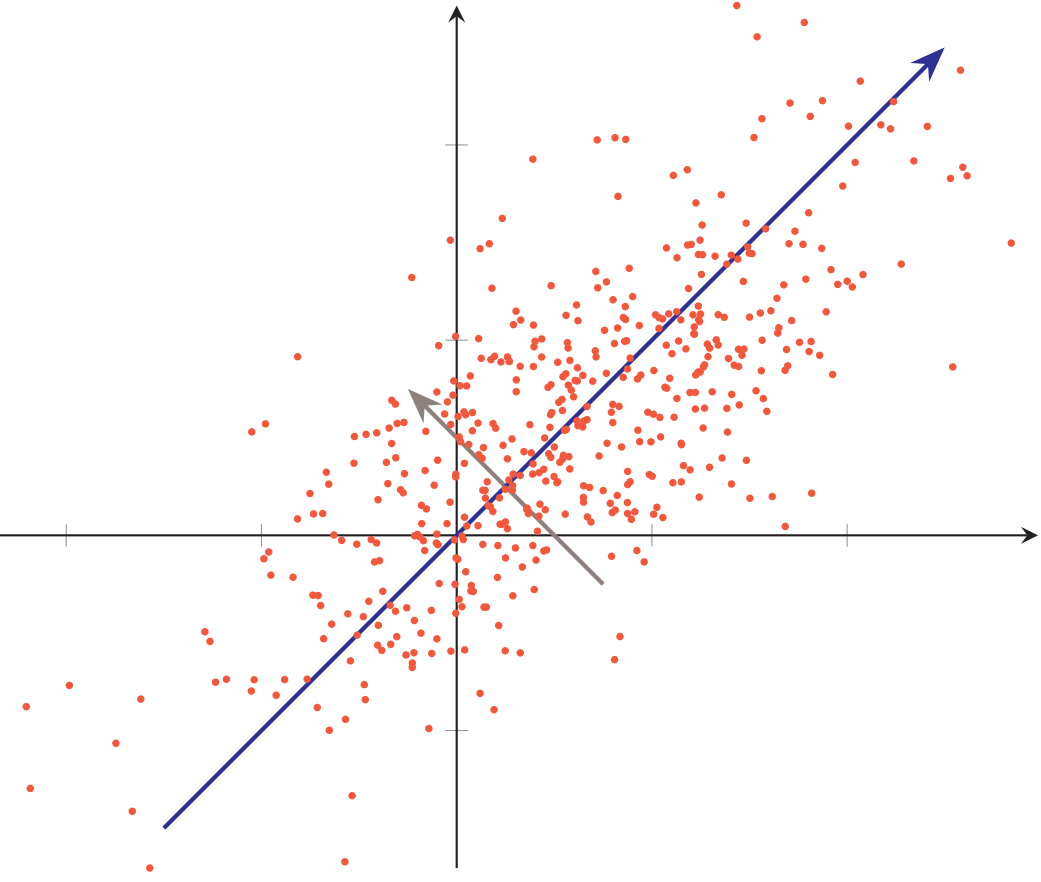
主成分分析(principal component analysis, PCA) 是一种最常用的数据降维方法,使得在转换后的空间中数据的方差最大。如下图所示的二维数据,如果将这些数据投影到一维空间,选择数据方差最大的方向进行投影(蓝轴),才能最大化数据的差异性,保留更多的原始数据信息。
假设有一组$d$维样本$\boldsymbol x^{(n)} \in \mathbb R^d, 1 \leqslant n \leqslant N$,我们希望将其投影到一维空间中,投影向量为$\boldsymbol w \in \mathbb R^d$。不失一般性,限制$\boldsymbol w$的模为1,即$\boldsymbol w^\text T \boldsymbol w=1$。每个样本点$\boldsymbol x^{(n)}$投影之后的表示为$z^{(n)}=\boldsymbol w^\text T \boldsymbol x^{(n)}$。
$$ \begin{aligned} \sigma(X ; \boldsymbol{w}) &=\frac{1}{N} \sum_{n=1}^{N}(\boldsymbol{w}^{\mathrm{T}} \boldsymbol{x}^{(n)}-\boldsymbol{w}^{\mathrm{T}} \bar{\boldsymbol{x}})^{2} \\ &=\frac{1}{N}(\boldsymbol{w}^{\mathrm{T}} X-\boldsymbol{w}^{\mathrm{T}} \bar{X})(\boldsymbol{w}^{\mathrm{T}} X-\boldsymbol{w}^{\mathrm{T}} \bar{X})^{\mathrm{T}} \\ &=\boldsymbol{w}^{\mathrm{T}} \boldsymbol{S} \boldsymbol{w} \end{aligned} $$其中,$\bar X=\bar{\boldsymbol x} \boldsymbol 1_d^\text T$为$d$列$\bar{\boldsymbol x}$组成的矩阵,$S=\frac{1}{N}(X-\bar{X})(X-\bar{X})^{\mathrm{T}}$是原始样本的协方差矩阵。
$$ \max _{\boldsymbol{w}} \boldsymbol{w}^{\mathrm{T}} S \boldsymbol{w}+\lambda(1-\boldsymbol{w}^{\mathrm{T}} \boldsymbol{w}) $$其中$\lambda$为拉格朗日乘子。对上式求导并令导数为0,可得$S \boldsymbol{w}=\lambda \boldsymbol{w}$。
从上式可知,$\boldsymbol w$是协方差矩阵$S$的特征向量,$\lambda$为特征值。同时,$\sigma(X ; w)=\boldsymbol{w}^{\mathrm{T}} S \boldsymbol{w}=\boldsymbol{w}^{\mathrm{T}} \lambda \boldsymbol{w}=\lambda$。
$\lambda$也是投影后样本的方差。因此,主成分分析可以转换成一个矩阵特征值分解问题,投影向量$\boldsymbol w$为矩阵$S$的最大特征值对应的特征向量。
如果要通过投影矩阵$W \in R^{d \times d^{\prime}}$将样本投到$d^\prime$维空间,投影矩阵满足$W^\text T W=\boldsymbol I$,只需要将$S$的特征值从大到小排列,保留前$d^\prime$个特征值,其对应的特征向量即是最优的投影矩阵。
主成分分析是一种无监督学习方法,可以作为监督学习的数据预处理方法,用来去除噪声并减少特征之间的相关性,但是它不能保证投影后数据的类别可分性更好。提高两类可分性的方法一般为监督学习方法,比如线性判别分析(linear discriminant analysis, LDA)。
基于numpy的主成分分析算法实现
import numpy as np
from sklearn import datasets
import matplotlib.pyplot as plt
class PCA():
# 计算协方差矩阵
def calc_cov(self, X):
m = X.shape[0]
# 数据标准化
X = (X - np.mean(X, axis=0)) / np.var(X, axis=0)
return 1 / m * np.matmul(X.T, X)
def pca(self, X, n_components):
# 计算协方差矩阵
cov_matrix = self.calc_cov(X)
# 计算协方差矩阵的特征值和对应特征向量
eigenvalues, eigenvectors = np.linalg.eig(cov_matrix)
# 对特征值排序
idx = eigenvalues.argsort()[::-1]
# 取最大的前n_component组
eigenvectors = eigenvectors[:, idx]
eigenvectors = eigenvectors[:, :n_components]
# Y=PX转换
return np.matmul(X, eigenvectors)
# 导入sklearn的鸢尾花数据集
iris = datasets.load_iris()
X = iris.data
y = iris.target
# 将数据降维到3个主成分
X_trans = PCA().pca(X, 3)
colors = ['navy', 'turquoise', 'darkorange']
# 绘制不同类别
for c, i, target_name in zip(colors, [0, 1, 2], iris.target_names):
plt.scatter(X_trans[y == i, 0], X_trans[y == i, 1],
color=c, lw=2, label=target_name)
plt.legend()
plt.show()
使用scikit-learn中的主成分分析算法对Olivetti人脸数据集进行降维及特征脸的提取
import numpy as np
import matplotlib.pyplot as plt
from sklearn.datasets import fetch_olivetti_faces
from sklearn.decomposition import PCA
dataset = fetch_olivetti_faces(shuffle=True)
data = dataset['data']
print(data.shape) # 原始数据的形状
pca = PCA(n_components=128)
pca.fit(data)
plt.subplot(1, 2, 1)
plt.title('raw first figure')
plt.imshow(data[0].reshape((64, 64)))
data_pca = pca.transform(data)
print(data_pca.shape) # 降维后数据的形状
data_recover = pca.inverse_transform(data_pca).reshape(400, 64, 64)
print(data_recover.shape)
plt.subplot(1, 2, 2)
plt.title('recovered first figure (n_components=128)')
plt.imshow(data_recover[0])
plt.show()
# 获取主成分,即特征脸
comp = pca.components_
print(comp.shape)
for i in range(16):
plt.subplot(4, 4, i + 1)
plt.imshow(comp[i].reshape((64, 64)))
plt.show()
流形学习
欧几里得空间(Euclidean space) 也称为平直空间。基础物理、数学都是建立在欧氏空间基础上的。在欧氏空间中,0维的欧几里得空间是一个点;1维的欧几里得空间是一条线;2维的欧几里得空间是一个平面;3维的欧几里得空间是立体空间,它们都满足两点间的最短距离是一条直线。基于欧氏空间的几何学称为欧几里得几何。
欧几里得几何的局限性:它不能包含两点间最短距离是曲线的情况,如球面上的两点间最短距离。故对于更加宏观的航海、天体物理等研究而言,通过欧几里得空间来研究它们是不适合的。由此引入了黎曼几何,而黎曼几何研究的对象就是流形(manifold)。
流形整体而言是“扭曲的”,然而其局部又类似于欧几里得空间。因此,我们可以利用欧几里得几何里已知的方法去研究流形的局部。然后再将这些局部信息拼接起来,以达到研究流形的目的。这和微分的思想很像:直接计算一条曲线的长度比较难,那我将其切分成若干小段,每段近似于一条直线,这些直线的长度相加的总和就是这条曲线的长度。

流形学习(manifold learing) 是机器学习、模式识别中的一种方法,在维数约简方面具有广泛的应用。它的主要思想是将高维的数据映射到低维,使该低维的数据能够反映原高维数据的某些本质结构特征。流形学习的前提是有一种假设,即某些高维数据,实际是一种低维的流形结构嵌入在高维空间中。流形学习的目的是将其映射回低维空间中,揭示其本质。
通过流形学习来实现降维的方法有很多,其基本思想也类似:假设数据在高维具有某种结构特征,希望降到低维后,仍能保持该结构。比较常见的有局部线性嵌入(local linear embedding, LLE)、拉普拉斯特征映射(Laplacian eigenmaps, LE)、**等距映射(Isomap)**等。
SNE(stochastic neighbor embedding) 算法于2002年提出,其出发点是:在高维空间相似的数据点,映射到低维空间距离也是相似的。常规的做法是用欧式距离表示这种相似性,而SNE把这种距离关系转换为一种条件概率来表示相似性。
SNE存在拥挤问题:降维后不同类别的数据簇挤在一起,无法区分开来。为了解决该问题,t-SNE在SNE的基础上做了两点改进:(1) 把SNE变为对称SNE,(2) 在低维空间中采用了$t$分布代替原来的高斯分布,高维空间不变。
使用scikit-learn中的t-SNE算法完成恒星光谱数据的降维
import numpy as np
import matplotlib.pyplot as plt
import scipy.io as sio
from sklearn.manifold import TSNE
# 数据获取 (需要预先将数据导入当前目录下)
# A F K M类恒星数据各1000条
X_a = sio.loadmat('spectra_data\A.mat')['P1'][:1000]
X_f = sio.loadmat('spectra_data\F.mat')['P1'][:1000]
X_k = sio.loadmat('spectra_data\K.mat')['P1'][:1000]
X_m = sio.loadmat('spectra_data\M.mat')['P1'][:1000]
X_label = ['A', 'F', 'K', 'M']
X = np.vstack((X_a, X_f, X_k, X_m))
# 类别标签
y_a = np.full((X_a.shape[0],), 0)
y_f = np.full((X_f.shape[0],), 1)
y_k = np.full((X_k.shape[0],), 2)
y_m = np.full((X_m.shape[0],), 3)
y = np.hstack((y_a, y_f, y_k, y_m))
# 数据归一化
for i in range(X.shape[0]):
X[i] -= np.min(X[i])
if np.max(X[i]) != 0:
X[i] /= np.max(X[i])
print('Data shape: ', X.shape)
print('Label shape: ', y.shape)
# 降维
tsne = TSNE()
X_tsne = tsne.fit_transform(X)
# 绘制降维结果
plt.scatter(X_tsne[y == 0, 0], X_tsne[y == 0, 1], label='A')
plt.scatter(X_tsne[y == 1, 0], X_tsne[y == 1, 1], label='F')
plt.scatter(X_tsne[y == 2, 0], X_tsne[y == 2, 1], label='K')
plt.scatter(X_tsne[y == 3, 0], X_tsne[y == 3, 1], label='M')
plt.legend()
plt.show()
参考资料
- 周志华. 机器学习. 北京: 清华大学出版社, 2016.
- 李航. 统计学习方法. 北京: 清华大学出版社, 2019.
- 邱锡鹏. 神经网络与深度学习. 北京: 机械工业出版社, 2020.
- 鲁伟. 机器学习:公式推导与代码实现. 北京: 人民邮电出版社, 2022.
- 流形学习:https://www.zhihu.com/question/24015486
- SNE与t-SNE:http://bindog.github.io/blog/2016/06/04/from-sne-to-tsne-to-largevis/